shape More...
#include <a_shape_cylinder.h>
 Inheritance diagram for a_shape_cylinder:
Inheritance diagram for a_shape_cylinder: Collaboration diagram for a_shape_cylinder:
Collaboration diagram for a_shape_cylinder: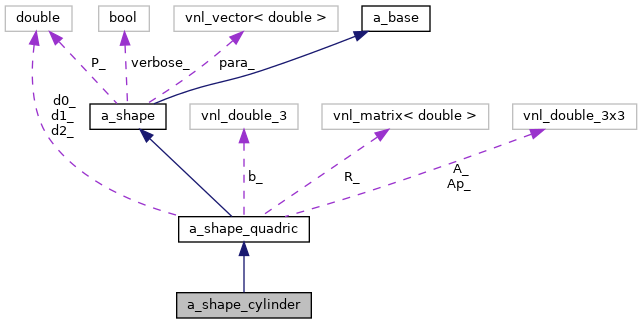
Public Member Functions | |
| a_shape_cylinder () | |
| virtual const std::string | classname () const |
| void | p9pts (const a_point *pt) |
| double | radius () const |
| void | radius (const double r) |
| a_point | center () const |
| void | center (const a_point c) |
| a_point | dir () const |
| void | dir (const a_point d) |
| a_point | closest_point (const a_point pt) const |
| int | threshold_cloud (const std::vector< a_point > &pts, std::vector< a_point > &pts2) |
| void | fit_cloud (std::vector< a_point > &pts, short nl=1) |
| void | export_points (const unsigned int nseg, const std::vector< a_point > &pts) const |
| void | export_triangles (const unsigned int nseg, const std::vector< a_point > &pts) const |
| void | export_matrices () const |
| Public Member Functions inherited from a_shape_quadric | |
| a_shape_quadric () | |
| void | p9pts (const a_point &p1, const a_point &p2, const a_point &p3, const a_point &p4, const a_point &p5, const a_point &p6, const a_point &p7, const a_point &p8, const a_point &p9) |
| a_point | center () const |
| a_point | principals () const |
| a_point | n1 () const |
| a_point | n2 () const |
| a_point | n3 () const |
| virtual double | dist_point (a_point p) const |
| void | random_hint (const std::vector< a_point > &pts) |
| void | fit_cloud (std::vector< a_point > &pts, short nl=1) |
| void | export_points (const unsigned int nseg, const std::vector< a_point > &pts) const |
| void | export_triangles (const unsigned int nseg, const std::vector< a_point > &pts) const |
| vnl_double_3x3 | A () const |
| void | Ap () |
| vnl_double_3 | b () const |
| void | init_dist () |
| void | getA () const |
| void | getb () const |
| void | getAp () const |
| Public Member Functions inherited from a_shape | |
| a_shape (int n_parameters) | |
| virtual | ~a_shape () |
| void | P (const double P) |
| double | P () const |
| unsigned int | npara () const |
| double | dist_cloud (const std::vector< a_point > &pts) |
| double | average_dist_cloud (const std::vector< a_point > &pts) |
| double | rms_dist_cloud (const std::vector< a_point > &pts) |
| int | threshold_cloud (const std::vector< a_point > &pts, std::vector< a_point > &pts2) |
| int | best_fitting_cloud (const std::vector< a_point > &pts, std::vector< a_point > &pts2) |
| void | fit_cloud (const std::vector< a_point > &pts, vnl_least_squares_function &fn) |
| vnl_vector< double > | getparameters () const |
| void | para (const int i, const double val) |
| void | export_inliers (const std::vector< a_point > &pts) |
| void | export_outliers (const std::vector< a_point > &pts) |
| void | verbose (bool v) |
Static Public Member Functions | |
| static const std::string | help () |
| Static Public Member Functions inherited from a_shape_quadric | |
| static const std::string | help () |
| Static Public Member Functions inherited from a_shape | |
| static const std::string | help () |
Additional Inherited Members | |
| Protected Attributes inherited from a_shape_quadric | |
| vnl_double_3x3 | A_ |
| vnl_double_3x3 | Ap_ |
| vnl_double_3 | b_ |
| double | d0_ |
| double | d1_ |
| double | d2_ |
| vnl_matrix< double > | R_ |
| Protected Attributes inherited from a_shape | |
| double | P_ |
| vnl_vector< double > | para_ |
| bool | verbose_ |
Detailed Description
shape
Definition at line 27 of file a_shape_cylinder.h.
Constructor & Destructor Documentation
◆ a_shape_cylinder()
|
inline |
Definition at line 30 of file a_shape_cylinder.h.
Member Function Documentation
◆ center() [1/2]
| a_point a_shape_cylinder::center | ( | ) | const |

◆ center() [2/2]
| void a_shape_cylinder::center | ( | const a_point | c | ) |
Definition at line 66 of file a_shape_cylinder.cxx.
◆ classname()
|
inlinevirtual |
Reimplemented from a_shape_quadric.
Definition at line 31 of file a_shape_cylinder.h.
◆ closest_point()
|
virtual |
Reimplemented from a_shape_quadric.
Definition at line 176 of file a_shape_cylinder.cxx.
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
◆ dir() [1/2]
| a_point a_shape_cylinder::dir | ( | ) | const |
◆ dir() [2/2]
| void a_shape_cylinder::dir | ( | const a_point | d | ) |
Definition at line 77 of file a_shape_cylinder.cxx.
◆ export_matrices()
|
virtual |
Reimplemented from a_shape_quadric.
Definition at line 244 of file a_shape_cylinder.cxx.
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
◆ export_points()
| void a_shape_cylinder::export_points | ( | const unsigned int | nseg, |
| const std::vector< a_point > & | pts | ||
| ) | const |

◆ export_triangles()
| void a_shape_cylinder::export_triangles | ( | const unsigned int | nseg, |
| const std::vector< a_point > & | pts | ||
| ) | const |

◆ fit_cloud()
|
virtual |
Implements a_shape.
Definition at line 208 of file a_shape_cylinder.cxx.
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
◆ help()
|
static |
Definition at line 54 of file a_shape_cylinder.cxx.
Here is the call graph for this function: Here is the caller graph for this function:
Here is the caller graph for this function:
◆ p9pts()
|
virtual |
Reimplemented from a_shape_quadric.
Definition at line 99 of file a_shape_cylinder.cxx.
Here is the call graph for this function:
◆ radius() [1/2]
| double a_shape_cylinder::radius | ( | ) | const |

◆ radius() [2/2]
| void a_shape_cylinder::radius | ( | const double | r | ) |
Definition at line 85 of file a_shape_cylinder.cxx.
◆ threshold_cloud()
| int a_shape_cylinder::threshold_cloud | ( | const std::vector< a_point > & | pts, |
| std::vector< a_point > & | pts2 | ||
| ) |
The documentation for this class was generated from the following files:
- include/a_shape_cylinder.h
- shape/a_shape_cylinder.cxx