shape
More...
#include <a_shape_quadric.h>
|
| | a_shape_quadric () |
| |
| virtual const std::string | classname () const |
| |
| virtual void | p9pts (const a_point *pt) |
| |
| void | p9pts (const a_point &p1, const a_point &p2, const a_point &p3, const a_point &p4, const a_point &p5, const a_point &p6, const a_point &p7, const a_point &p8, const a_point &p9) |
| |
| a_point | center () const |
| |
| a_point | principals () const |
| |
| a_point | n1 () const |
| |
| a_point | n2 () const |
| |
| a_point | n3 () const |
| |
| virtual a_point | closest_point (const a_point p) const |
| |
| virtual double | dist_point (a_point p) const |
| |
| void | random_hint (const std::vector< a_point > &pts) |
| |
| void | fit_cloud (std::vector< a_point > &pts, short nl=1) |
| |
| virtual void | export_matrices () const |
| |
| void | export_points (const unsigned int nseg, const std::vector< a_point > &pts) const |
| |
| void | export_triangles (const unsigned int nseg, const std::vector< a_point > &pts) const |
| |
| vnl_double_3x3 | A () const |
| |
| void | Ap () |
| |
| vnl_double_3 | b () const |
| |
| void | init_dist () |
| |
| void | getA () const |
| |
| void | getb () const |
| |
| void | getAp () const |
| |
| | a_shape (int n_parameters) |
| |
| virtual | ~a_shape () |
| |
| void | P (const double P) |
| |
| double | P () const |
| |
| unsigned int | npara () const |
| |
| double | dist_cloud (const std::vector< a_point > &pts) |
| |
| double | average_dist_cloud (const std::vector< a_point > &pts) |
| |
| double | rms_dist_cloud (const std::vector< a_point > &pts) |
| |
| int | threshold_cloud (const std::vector< a_point > &pts, std::vector< a_point > &pts2) |
| |
| int | best_fitting_cloud (const std::vector< a_point > &pts, std::vector< a_point > &pts2) |
| |
| void | fit_cloud (const std::vector< a_point > &pts, vnl_least_squares_function &fn) |
| |
| vnl_vector< double > | getparameters () const |
| |
| void | para (const int i, const double val) |
| |
| void | export_inliers (const std::vector< a_point > &pts) |
| |
| void | export_outliers (const std::vector< a_point > &pts) |
| |
| void | verbose (bool v) |
| |
|
| static const std::string | help () |
| |
| static const std::string | help () |
| |
shape
Definition at line 28 of file a_shape_quadric.h.
◆ a_shape_quadric()
| a_shape_quadric::a_shape_quadric |
( |
| ) |
|
◆ A()
| vnl_double_3x3 a_shape_quadric::A |
( |
| ) |
const |
◆ Ap()
| void a_shape_quadric::Ap |
( |
| ) |
|
◆ b()
| vnl_double_3 a_shape_quadric::b |
( |
| ) |
const |
◆ center()
| a_point a_shape_quadric::center |
( |
| ) |
const |
◆ classname()
| virtual const std::string a_shape_quadric::classname |
( |
| ) |
const |
|
inlinevirtual |
◆ closest_point()
| a_point a_shape_quadric::closest_point |
( |
const a_point |
p | ) |
const |
|
virtual |
◆ dist_point()
| double a_shape_quadric::dist_point |
( |
a_point |
p | ) |
const |
|
virtual |
◆ export_matrices()
| void a_shape_quadric::export_matrices |
( |
| ) |
const |
|
virtual |
◆ export_points()
| void a_shape_quadric::export_points |
( |
const unsigned int |
nseg, |
|
|
const std::vector< a_point > & |
pts |
|
) |
| const |
◆ export_triangles()
| void a_shape_quadric::export_triangles |
( |
const unsigned int |
nseg, |
|
|
const std::vector< a_point > & |
pts |
|
) |
| const |
◆ fit_cloud()
| void a_shape_quadric::fit_cloud |
( |
std::vector< a_point > & |
pts, |
|
|
short |
nl = 1 |
|
) |
| |
|
virtual |
◆ getA()
| void a_shape_quadric::getA |
( |
| ) |
const |
|
inline |
◆ getAp()
| void a_shape_quadric::getAp |
( |
| ) |
const |
|
inline |
◆ getb()
| void a_shape_quadric::getb |
( |
| ) |
const |
|
inline |
◆ help()
| const std::string a_shape_quadric::help |
( |
| ) |
|
|
static |
◆ init_dist()
| void a_shape_quadric::init_dist |
( |
| ) |
|
|
virtual |
◆ n1()
| a_point a_shape_quadric::n1 |
( |
| ) |
const |
◆ n2()
| a_point a_shape_quadric::n2 |
( |
| ) |
const |
◆ n3()
| a_point a_shape_quadric::n3 |
( |
| ) |
const |
◆ p9pts() [1/2]
| void a_shape_quadric::p9pts |
( |
const a_point & |
p1, |
|
|
const a_point & |
p2, |
|
|
const a_point & |
p3, |
|
|
const a_point & |
p4, |
|
|
const a_point & |
p5, |
|
|
const a_point & |
p6, |
|
|
const a_point & |
p7, |
|
|
const a_point & |
p8, |
|
|
const a_point & |
p9 |
|
) |
| |
◆ p9pts() [2/2]
| void a_shape_quadric::p9pts |
( |
const a_point * |
pt | ) |
|
|
virtual |
◆ principals()
| a_point a_shape_quadric::principals |
( |
| ) |
const |
◆ random_hint()
| void a_shape_quadric::random_hint |
( |
const std::vector< a_point > & |
pts | ) |
|
|
virtual |
◆ A_
| vnl_double_3x3 a_shape_quadric::A_ |
|
protected |
◆ Ap_
| vnl_double_3x3 a_shape_quadric::Ap_ |
|
protected |
◆ b_
| vnl_double_3 a_shape_quadric::b_ |
|
protected |
◆ d0_
| double a_shape_quadric::d0_ |
|
protected |
◆ d1_
| double a_shape_quadric::d1_ |
|
protected |
◆ d2_
| double a_shape_quadric::d2_ |
|
protected |
◆ R_
| vnl_matrix<double> a_shape_quadric::R_ |
|
protected |
The documentation for this class was generated from the following files:
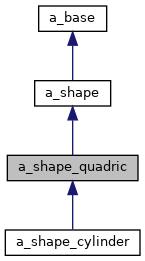
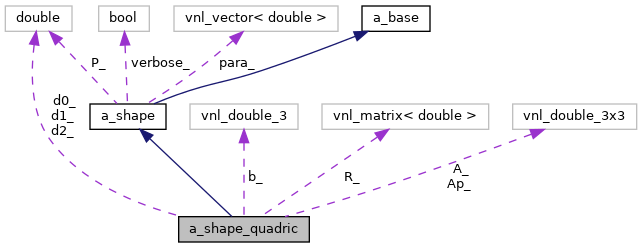
 Inheritance diagram for a_shape_quadric:
Inheritance diagram for a_shape_quadric: